
摘要:本文详细阐述了四旋翼的控制原理。四旋翼是一种典型的无人飞行器,通过控制四个电机的转速和转向来实现飞行姿态的调整。文章介绍了四旋翼的基本结构,重点分析了其控制原理,包括飞行姿态控制、高度控制和位置控制等方面。通过本文,读者可以全面了解四旋翼的控制方式和原理,为无人机的应用和开发提供理论基础。
本文目录导读:
四旋翼飞行器作为一种典型的无人飞行器,广泛应用于航空模型、科学研究、民用和军事领域,其独特的结构设计和飞行原理使得它在空中具有高度的灵活性和稳定性,本文将详细介绍四旋翼飞行器的控制原理,帮助读者更好地理解其工作原理。
四旋翼飞行器概述
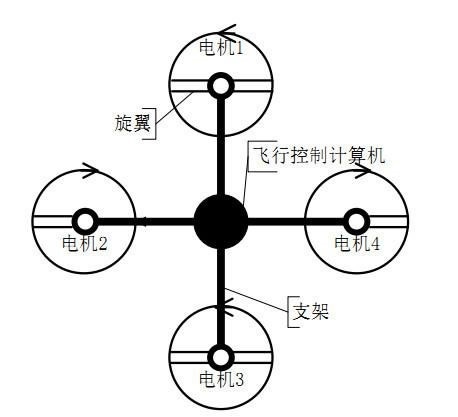
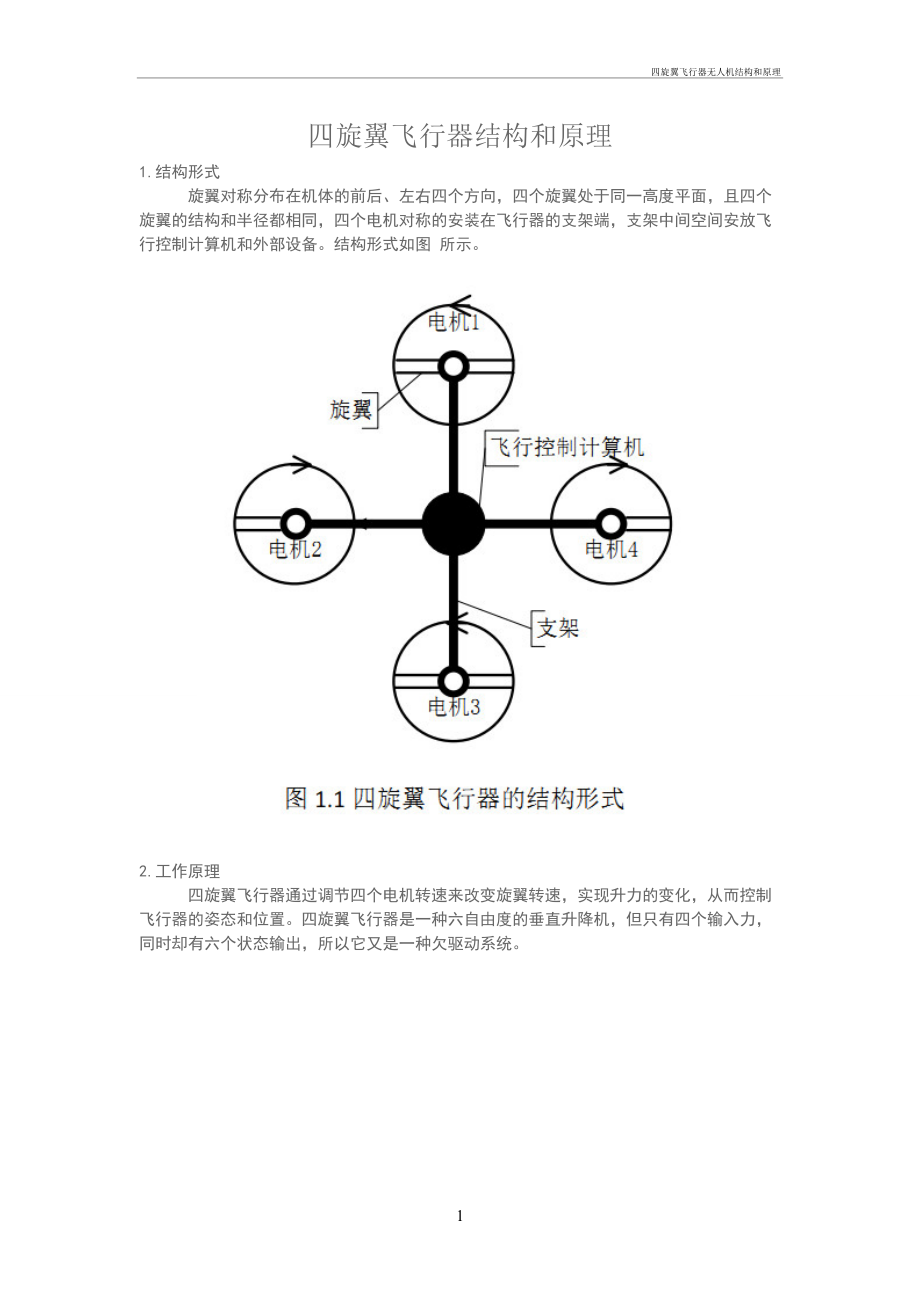
四旋翼飞行器主要由四个旋翼、机架、动力系统和控制系统等组成,四个旋翼对称分布在机架的四个角上,通过动力系统驱动,产生升力和控制力,控制系统负责接收指令,根据飞行状态调整动力系统,实现飞行器的起飞、悬停、前进、后退、左转、右转和降落等动作。
四旋翼控制原理
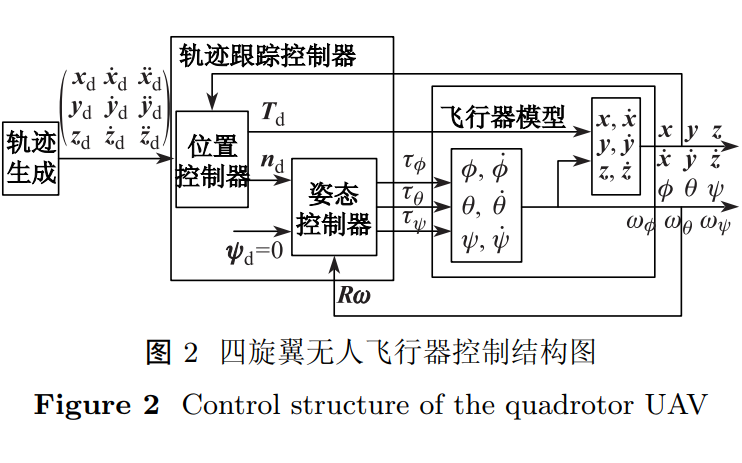
四旋翼飞行器的控制原理主要基于牛顿第三定律和力学原理,通过调整四个旋翼的转速,改变升力和方向,实现对飞行器的控制,四旋翼的控制原理包括以下几个方面:
1、升降控制:通过调整四个旋翼的转速,改变总升力的大小,实现飞行器的升降,当总升力大于重力时,飞行器上升;当总升力小于重力时,飞行器下降。
2、姿态控制:通过调整不同旋翼的转速,改变飞行器在空中的姿态,增加前、后旋翼的转速,减少左、右旋翼的转速,可以使飞行器向前飞行;反之则向后飞行,同理,通过调整左右旋翼的转速差异,可以实现飞行器的左转和右转。
3、悬停控制:在悬停状态下,四个旋翼的转速相同,产生相同的升力,使得飞行器保持静止状态,通过微调旋翼转速以抵消外界干扰(如风力),保持飞行器的稳定性。
4、导航系统:通过GPS等定位设备获取飞行器的位置信息,与预设目标位置进行比较,生成控制指令发送给动力系统,引导飞行器飞向目标位置。
控制系统组成及功能
四旋翼飞行器的控制系统主要由遥控器、接收模块、处理模块和执行模块等组成,各模块的功能如下:
1、遥控器:负责发送控制指令,操作简便,可实现远程操控。
2、接收模块:负责接收遥控器的控制指令,并将其转换为处理模块可以识别的信号。
3、处理模块:对接收到的信号进行处理和分析,根据飞行状态和目标位置生成控制指令。
4、执行模块:根据处理模块的控制指令调整动力系统(如电机转速),实现飞行器的升降、姿态调整和导航等动作。
实际应用及挑战
四旋翼飞行器在航空模型、科学研究、民用和军事等领域有广泛的应用前景,在农业领域,可以利用四旋翼飞行器进行农药喷洒、植物检测等作业;在救援领域,可以利用四旋翼飞行器进行物资运输、搜救和监控等任务,在实际应用中,四旋翼飞行器面临着诸多挑战,如复杂环境下的稳定性问题、续航能力问题、导航精度问题等,为了解决这些问题,需要不断优化飞行器的设计、提高控制系统的性能、加强数据处理和分析能力等。
本文详细介绍了四旋翼飞行器的控制原理,包括升降控制、姿态控制、悬停控制和导航系统等方面,介绍了控制系统的组成及功能,并探讨了四旋翼飞行器在实际应用中的挑战,通过本文的学习,读者可以更好地理解四旋翼飞行器的工作原理和控制技术,为未来的研究和应用提供参考。
展望
随着科技的不断进步和应用需求的增加,四旋翼飞行器将在更多领域得到应用和发展,四旋翼飞行器将朝着更加智能化、自动化和高效化的方向发展,随着新材料和新能源的应用,四旋翼飞行器的性能和续航能力将得到进一步提升,随着人工智能技术的发展,四旋翼飞行器的自主导航和避障能力将得到显著提升,使其在复杂环境下具有更强的适应性和稳定性,四旋翼飞行器具有广阔的应用前景和巨大的发展潜力,值得我们继续深入研究和探索。